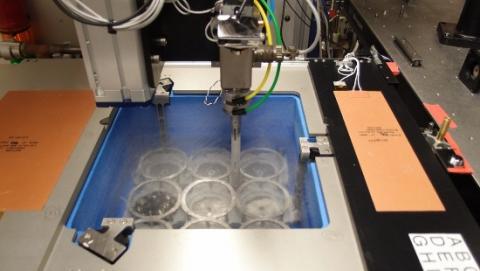
The BAM-2 automounter in use at MAcCHESS beamline is controlled primarily through the ADX data collection interface, and a separate BAM-2 interface provides access to additional features.
General description:
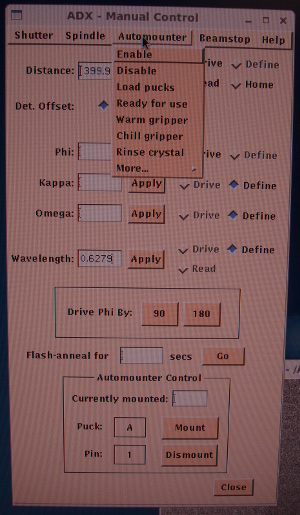
The most frequent automounter commands are incorporated into the ADX "manual Control" panel. This panel can be opened from the ADX main menu panel (SETUP > MANUAL CONTROL).
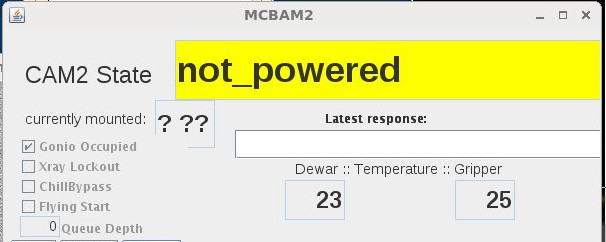
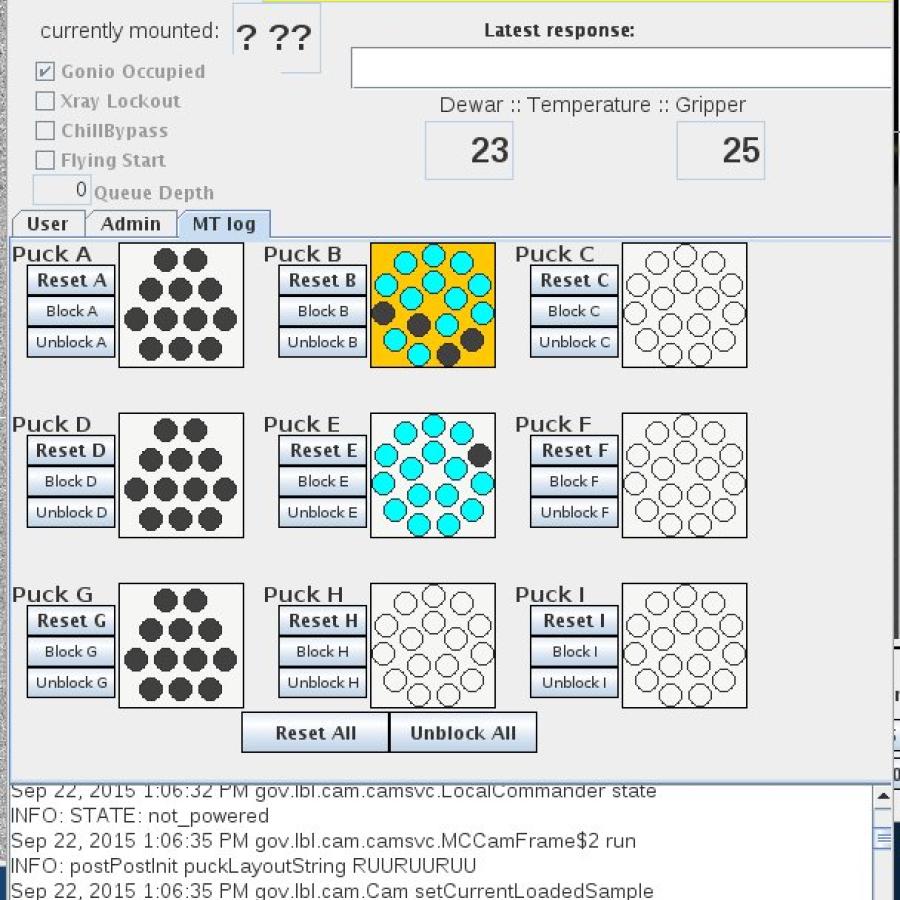
The commands are relayed through a dedicated interface which communicates with the automounter, provides access to more obscure commands, and displays detailed status information. This interface can be started up by double-clicking the "(Re)Start BAM2" icon on the left side of the desktop.